动态系统的定义
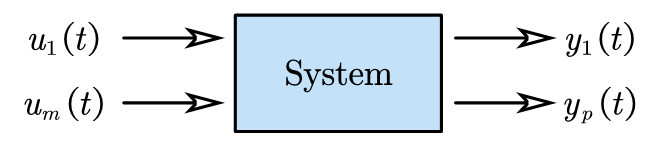
控制理论把系统当作成黑箱,那么这个黑箱和外界的交互,便对应了不同时间点的输入输出。
在 t 时刻,上面图中 m 个会影响系统的输入量在控制理论里称为控制变量,而这 p 个系统输出可以被传感器测量的量称为测量变量。这里我们只研究连续时变的线性系统,即系统输出量由描述系统的函数,通过输入量在时域上唯一确定。并且我们可以将系统的行为分为静态和动态两类。
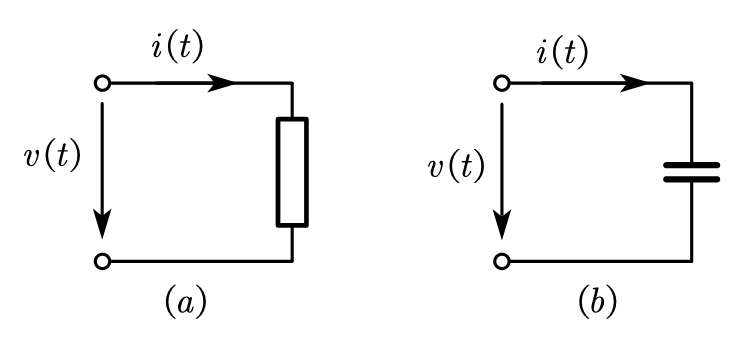
例 (a):
v(t)=R i(t)例 (b):
v(t)=v0+C1∫t0ti(τ)dτ显然例子 (a) 两端输出电压不随时间变化,而例子 (b) 因为电容的存在,电容在刚开始充电时,电容相当于短路,电流非常大;充电完成后,其电容上的电压等于电源电压,回路相当于断路。
后者的输出受到初始条件 v(t0),以及 i(τ) 在这个时间间距 [t0,t] 的积分来决定。系统的状态受到过去影响,随时间变化。这样的系统被称为动态系统。
动态系统的状态粗略地说就是指系统的过去、现在和将来的运动状况。精确地说,状态需要一组必要而充分的数据说明,用来 表征 。
状态变量
系统的状态变量,就是指足以完全确定系统运动状态的最小一组变量。一个用 n 阶微分方程描述的系统,就有 n 个独立变量,求得这 n 个独立变量的时间响应,系统的运动状态也就可以推知。可以说系统的状态变量就是 n 阶系统的 n 个独立变量。
需要指出的是,同一个系统,究竟选取那些变量作为状态变量,这不是唯一的,要紧的是这些状态变量是相互独立的,且其个数等于微分方程的阶数。
状态向量
如果完全描述一个系统的动态行为需要 n 个状态变量,那么这 n 个状态变量 x1(t),x2(t),…,xn(t) 作分量所构成的向量就叫做该系统的状态向量,记作
x=x1(t)x2(t)⋮xn(t)
通过构建状态向量,实际上为将带有物理意义的状态变量转化为 n 为空间的一个坐标,便于我们观察状态变量随时间的变化规律。
状态空间
以状态变量 x1(t),x2(t),…,xn(t) 为坐标所构成的 n 维空间,称为状态空间。
系统的任何状态,都可以用状态空间中的一个点来表示。即在特定时刻 t 状态向量 x(t) 在状态空间中是一个点。已知初始时刻的 x(t0),就得到状态空��间中的一个初始点。随着时间的推移,x(t) 在空间中描绘出一条轨迹,称为状态轨线。如下图所示:
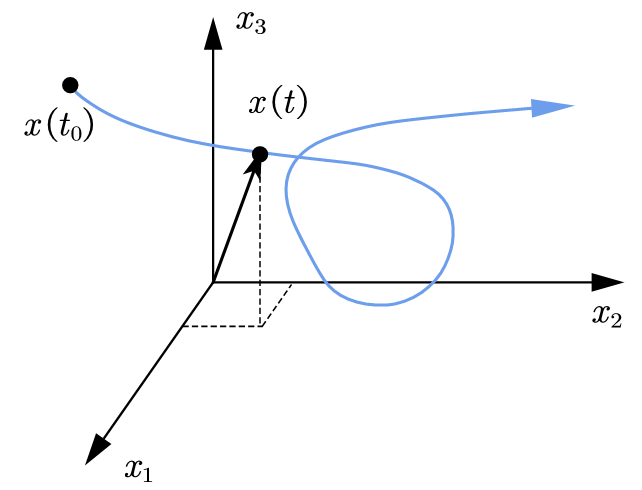
显然,状态轨线的形状,完全由系统在 t0 时刻初始状态和 t≥t0 的输入及系统的动态特性唯一决定的。
状态方程
描述系统状态变量与系统输入之间关系的一阶微分方程组称为状态方程
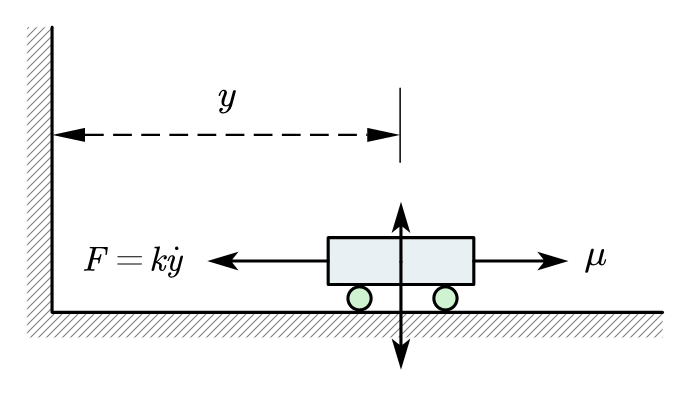 有一辆小车受到随速度而线性变化的水平向右的力 F=ky˙,以及来自地面的摩擦力 μ。则利用小学二年级学过的牛二可得方程:
有一辆小车受到随速度而线性变化的水平向右的力 F=ky˙,以及来自地面的摩擦力 μ。则利用小学二年级学过的牛二可得方程:
Ma=F⇓Mdt2d2y=μ−kdtdy若令 x1=y,x2=dtdy,即取 x1,x2 作为系统的一组状态变量,则可得一组一阶微分方程组:
⎩⎨⎧dtdx1=dtdy=x2dtdx2=dt2d2y=−Mkdtdy+M1μ=−Mkx2+M1μ我们将上述式子写为矢量的式子:
[x1˙x2˙]=[001−Mk][x1x2]+[0M1]u我们可以简写成:
x˙=Ax+bμ其中:
A=[001−Mk],b=[0M1],x=[x1x2]这里的 x˙=Ax+bμ 就是状态方程。
输出方程
描述系统的状态变量与输出变量一组代数方程称为输出方程。上图中,系统的输出为小车的位移 (请问系统的输入是什么?),则有:对于一般单输入——单输出系统,状态方程和输出方程为 y=x1 或写成矢量的形式:
y=[10][x1x2]
同时可以简写为:
y=c⊤x
其中 c⊤=[1,0],x=[x1x2]
状态空间描述
状态方程和输出方程一同构建一个系统动态的完整描�述,称为系统的状态空间表达式,也称为状态空间描述。状态方程和输出方程为:
⎩⎨⎧x˙1=f1(x1,x2,…xn,u1,u2…um,t),x1(t0)=x1,0x˙2=f2(x1,x2,…xn,u1,u2…um,t),x2(t0)=x2,0…x˙n=fn(x1,x2,…xn,u1,u2…um,t),xn(t0)=xn,0
⎩⎨⎧y1=h1(x1,x2,…xn�,u1,u2…um,t)y2=h2(x1,x2,…xn,u1,u2…um,t)…yp=hp(x1,x2,…xn,u1,u2…um,t)
同样的,我们可以用向量形式来描述这些方程组:
- x=[x1x2…xn]T 为总共 n 维状态变量;
- u=[u1u2…um]T 为总共 m 维输入向量;
- y=[y1y2…yp]T 为总共 p 维输出向量;
{x˙=f(x,u,t),x(t0)=x0y=h(x,u,t)
线性系统
上述两例子可知,系统的状态方程只用一阶的微分方程组就能很好描述系统,那么遇上更高阶的方程组怎么办呢?事实上考察一个动态系统有很多不同分类标准,我们在这里只探讨其中最主要的——线性、时不变性。
在 仿射变换与仿射函数 中说到线性系统满足齐次性以及可加性,所以其状态方程 x˙=f(x,u,t),x(t0)=x0 各自对应的部分可以分别叠加,即:
动态系统满足线性时变条件,当且仅当它可以有以下形式表示
{x˙=A(t)x+B(t)uy=C(t)x+D(t)u包含时变的 A(t)n×n 状态矩阵(系统矩阵),B(t)n×m 输入(控制矩阵),C(t)p×n 输出矩阵,D(t)p×m 输入量的直接传递矩阵
而当系统的系统输入量不随时间变化时,有时不变特性:
动态系统满足线性时不变条件,当它的输入轨迹 u(t) 自初始条件 x0 开始,从初始时间 t0 后一定时间 T≥0 之内,系统输出为 y(t)=ψ(t,u,x0,t0),总可以用以下形式表示:
ψ(t,u(t),x0,t0)=ψ(t+T,u(t−T),x0,t0+T)也就是说输入信号 u(t) 产生输出 y(t),那么对于任意时间延迟的输入 u(t+δ) 也将得到同样时间延迟的输出 y(t+δ)。
下面给出两个例子,来表明是时不变系统:
1.系统 A:y(t)=tx(t)
2.系统 B:y(t)=10⋅x(t)
显然,系统 A 除了 x(t) 还依赖了 t,所以是时变系统,而系统 B 没有显示依赖时间 t 所以是时不变的。
动态系统满足时不变条件,当且仅当它可以有以下形式表示
{x˙=Ax+Buy=Cx+Du而整个系统非线性时不变,自变量里面就没有 t,就是以下形式:
{x˙=f(x,u),x(t0)=x0y=h(x,u)
当系统非线性且与输入量无关,则称为自由非线性系统
{x˙=f(x,t),x(t0)=x0y=h(x,t)
而当系统既��自由而且时不变,被称为自洽的非线性系统
{x˙=f(x),x(t0)=x0y=h(x)