Koopman Theory
· 2 min read

Introduce
Koopman 是使用线性系统用来近似非线性系统的一个符号算子,使用线性系统近似非线性系统后,就可以使用线性系统的控制理论来控制非线性系统了。
值得注意的是:
算子是一个无穷维的线性变换,而我们要做的往往是用一个有限维度的 矩阵去近似 算子。而方法有:DMD、EDMD 和 Deep learning 的方法
线性系统
在 仿射变换与仿射函数 中已经探讨过如何判断线性性。
即线性性具有 可加性,齐次性。对于线性系统来说:若该系统的微分方程满足线性性,则该系统为线性系统。
系统的线性是指对系统输入变量 与输出变量 的线性
例如函数:
此时的 才是输入,所以即便 不是线性的,但是该系统仍然是线性的
warning
这里可能有点难以理解,我更想将这里的系统表述成某一种算子,它表示对于 信号 的一种 变换,这个跟前面一篇文章 Green 函数#Linear Differential Operators 是相通的,即:
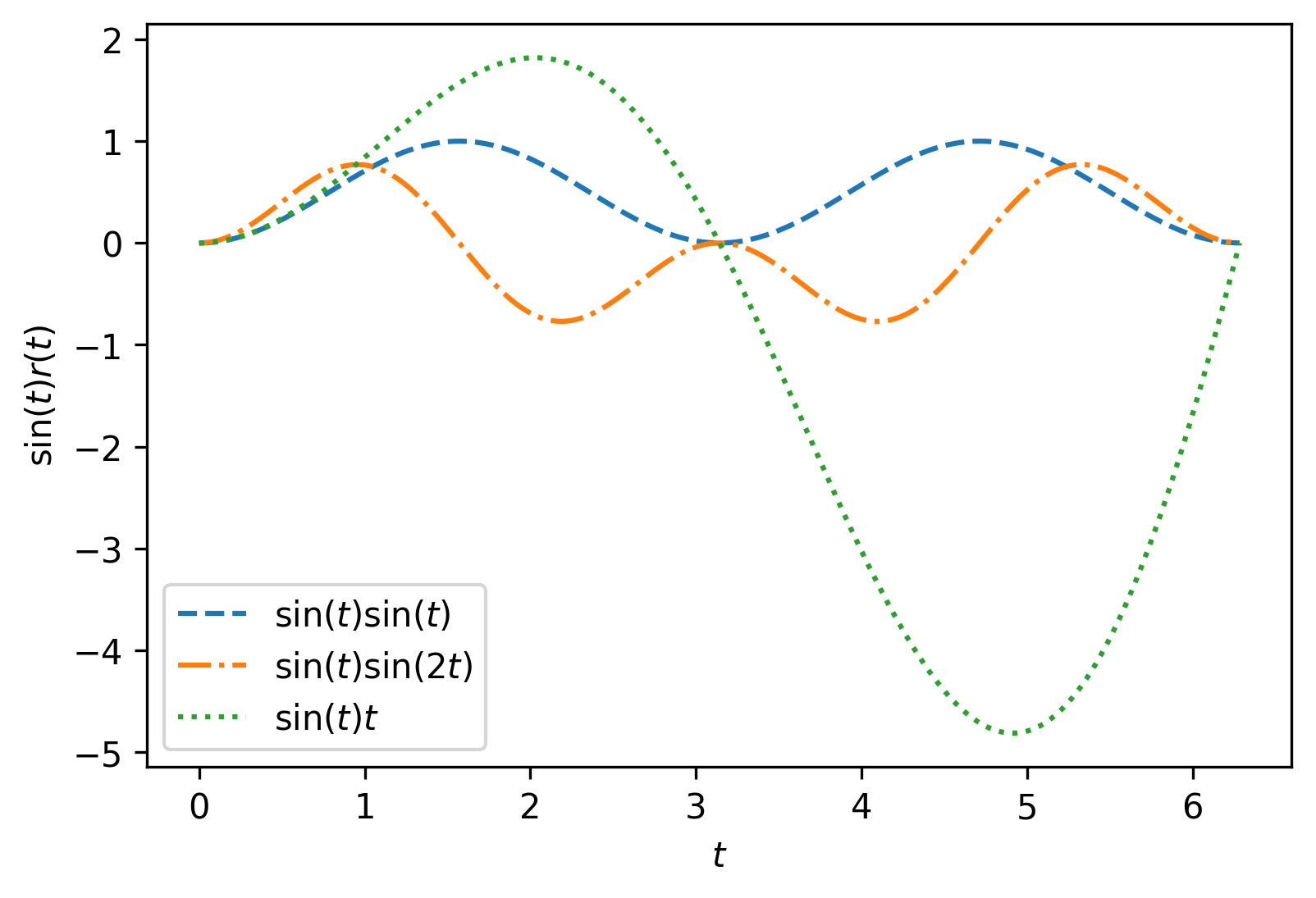
我们令 ,即算子 就是 Element-wise 乘以 ,下面我们将该 算子 作用到不同的 信号 上
这样的话,系统的线性性就很容易判断了,即我对输入 信号,做线性变换 ,输出是否同步放缩 ,可加性 (叠加性) 同理。